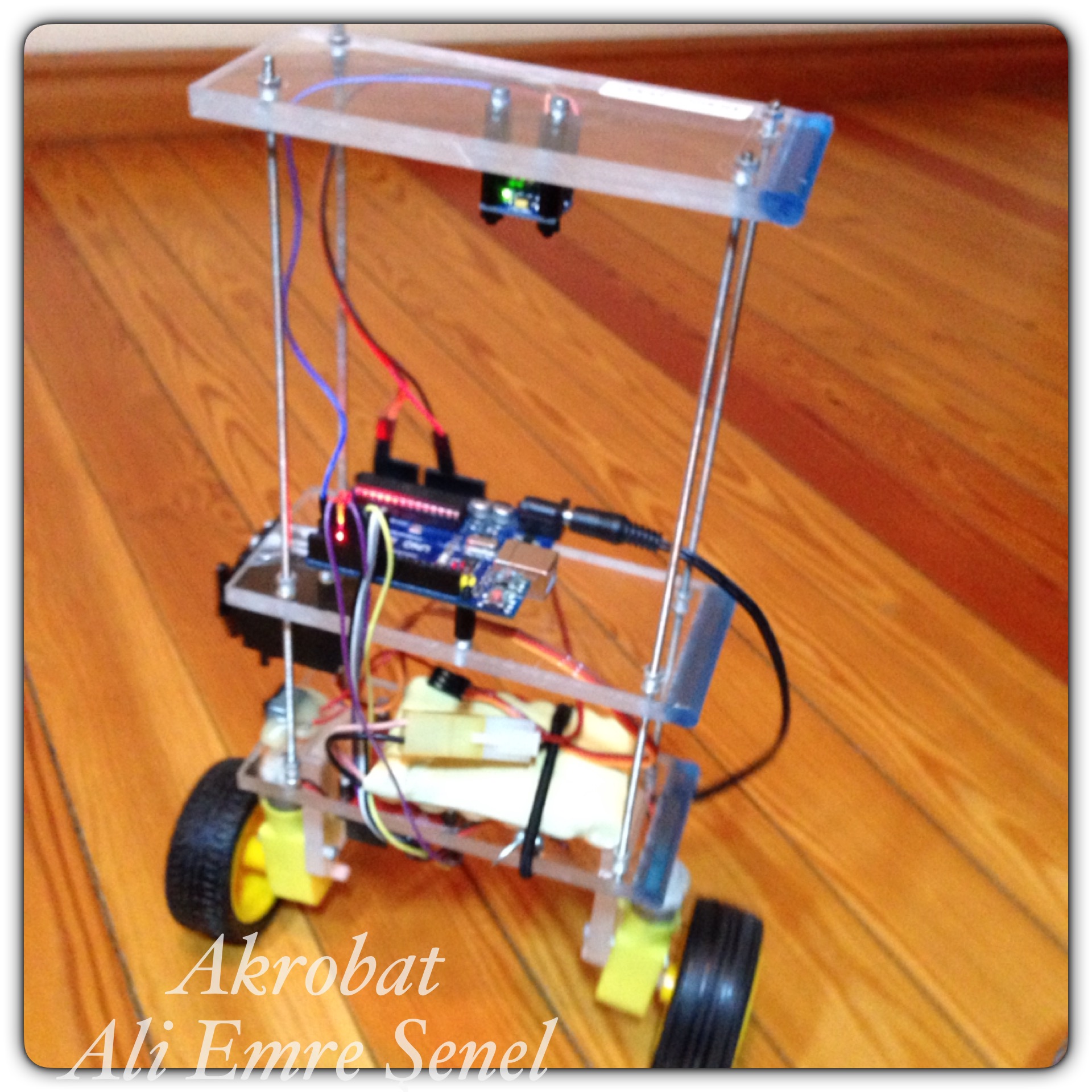
Akrobat
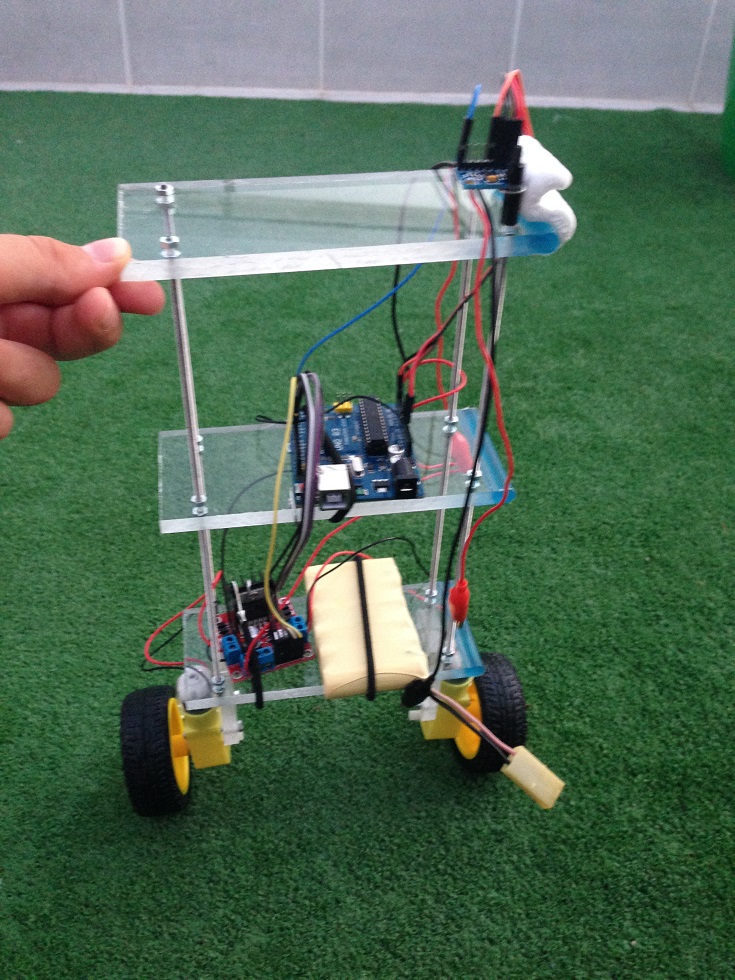
Bu projenin amacı üzerindeki arduino’ya bağlı gyroscope modülü aracılığıyla eğimini alıp kendi kendine dengede durabilen robot projesidir. Öncelikle tasarım çalışması yaptım. Robot arabamın sahip olmasını istediğim özellikleri belirledim. Bu özelliklere göre gerekli olacak malzemelerin listesini çıkardım. İnternetten araştırma yaparak bu malzemeleri nerelerden alabileceğimi belirledim. Robotumun dengede durabilmesi için iki tane düz tekerlek ve bunları hareket ettiren iki motor kullandım.
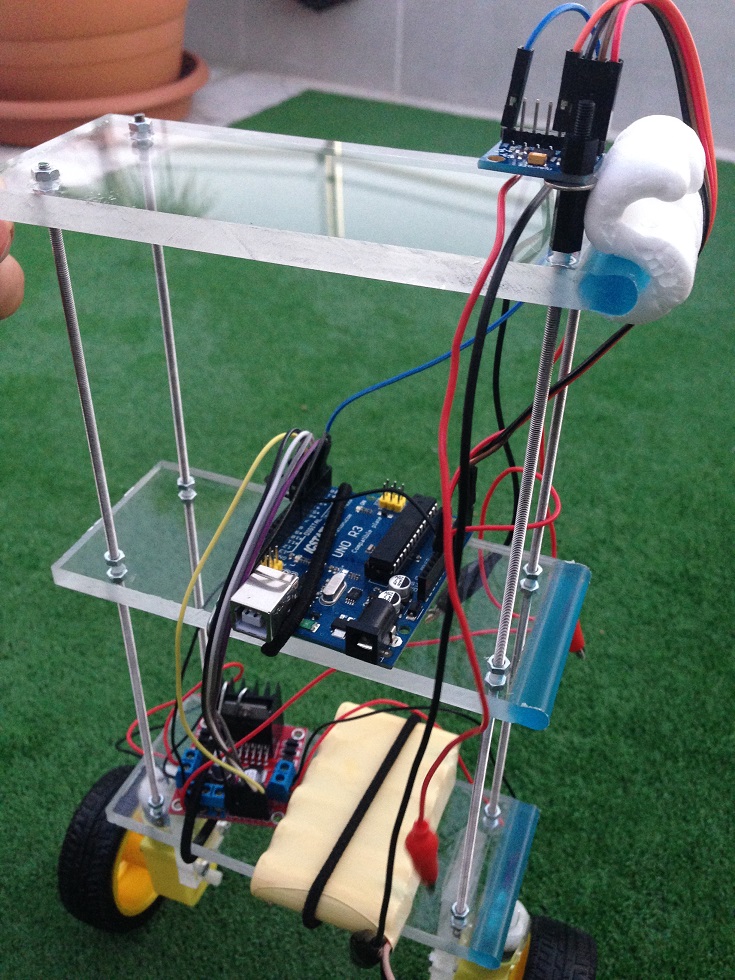
Robotumun eğimini anlaması için mpu6050 adında bir gyroscope modülü kullandım. Motorları hareket ettirmek için motor sürücüsü ve 7.2V’luk Ni-Cd pil kullandım.
Bütün sistemi kontrol etmesi ve dengeyi sağlaması için bir arduino kullandım. Tüm bu parçaları sabitlemek için akrilik levhalar ve onları birbirine bağlayan metal çubuklar kullanarak gövdeyi oluşturdum. Diğer yandan motorları çalıştırması ve robotumun dengede durması için c programlama dilinde arduino için program yazdım. Programımda mpu6050’den robotumun eğimini alıyorum sonra eğimi 180 derece yapmak için motorlarla robotun eğildiği tarafa doğru ilerletip eğildiği tarafın altına girerek dengeyi sağlıyorum.
Akrobat aşağıdaki parçalardan oluşmaktadır;
- Mekanik:
- Akrilik levhalardan şase
- İnce metal bağlantı çubukları
- İki tekerlek
- 6v DC motor
- Servo motor
- Elektronik:
- Arduino
- Motor sürücüsü
- Ni-Cd pil
- Mpu6050 gryroscope
- Yazılım:
- Akrobat.ino yazılımı
video için tıklayınız