GEZGİN(2014-2015)
Bu projenin amacı üzerindeki bilgisayara bağlı kamera modülü aracılığıyla yoldaki çizgileri tanıyıp kendi kendine yolunu bularak ilerleyen robot araç projesidir.Öncelikle tasarım çalışması yaptım.
Robot arabamın sahip olmasını istediğim özellikleri belirledim.
Bu özelliklere göre gerekli olacak malzemelerin listesini çıkardım.
İnternetten araştırma yaparak bu malzemeleri nerelerden alabileceğimi belirledim.
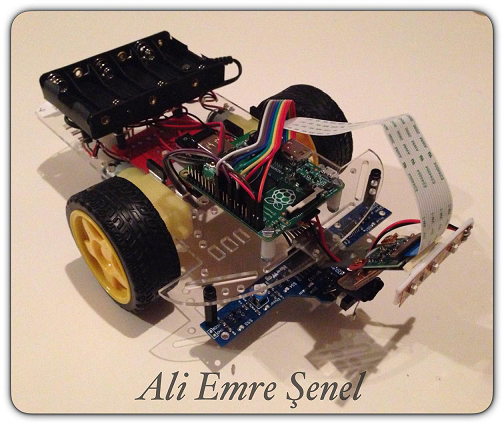
Robotumun daha kolay hareket etmesi için iki tane düz tekerlek ve bunları hareket ettiren iki motor kullandım.
Ayrıca arka kısmı dengelemek için 360 derece dönebilen üçüncü bir tekerlek kullandım.
Robotumun kılavuz çizgiyi algılayıp yolunu bulması için kamera modülü ekledim.
Kameranın daha iyi görüntü alabilmesi için ön kısımda 12V LED lamba kullandım.
Motorları hareket ettirmek için motor sürücüsü ve 1,5 V’luk altı tane kalem pil kullandım.
Bütün sistemi kontrol etmesi ve kameradan gelen verileri işlemesi için Raspberry Pi ve bu bilgisayarı yüksek elektrikten korumak içinse Voltaj Regülatörü koydum.
Bilgisayarla bağlantı içinse wi-fi adaptörü kullandım.
Tüm bu parçaları sabitlemek için akrilik bir gövde parçası kullandım.
Diğer yandan motorları çalıştırması ve kameradan gelen verileri işlemesi için Python programlama dilinde Raspberry Pi için program yazdım.
Programımda kameradan 640x480xRGB piksel resim çektim.
Sağ alt noktadan 45 piksel yukarda, 50 piksel solda olmak koşuluyla 5x5 piksel boyutunda matriksi referans alarak beyaz zemin parlaklığını buldum.
Bu referans değerden daha az parlak olan bölgeler içinde en uzun alanı, takip edeceğim çizgi olarak kabul ettim.
Çizgi orta pikselinin resim boyutunun yarısına olan mesafesine göre sağ motoru veya sol motor hızını ayarladım.
Böylece dönüşlerde de çizgiyi takip etmesini sağladım.
Ayrıca 320x240xRGB ve 160x120xRGB çözünürlük hesaplamalarında da bulundum.
Böylece saniyede işlediğim resim sayısını arttırarak daha hızlı çizgi takip etmesini sağladım.
I capture a picture sized 640x480xRGB pixels.
Then i get a matrix sized 5x5 pixels from picture so i know the value of white area.
After that i looked for the longest low value of the picture.
That's the line.
Then i found the middle of line and i found the middle of the picture.
After that i compare the middle of line and middle of the picture.
Then i start the motors.
GEZGİN aşağıdaki parçalardan oluşmaktadır;
- Mekanik:
- Akrilik şase
- İki ön tekerlek
- 6v DC motor
- 360 derece dönebilen arka tekerlek
- Elektronik:
- Raspberry Pi
- Motor sürücüsü
- Voltaj regülatörü
- 6 x 1,5 V kalem pil
- Kamera modülü
- Usb wi-fi adaptör
- 12V LED lamba
- Yazılım:
- Linux işletim sistemi
- Python
- Gezgin.py yazılımı
Projenin ileriki aşamalarında hedefim çevresini kameralar aracılığıyla algılayıp değerlendirerek kendi kendine hareket edebilen bir araç yapmaktır.