PiCAR(2013-2014)
Bilgisayar kontrollü robot araba projesi
Öncelikle tasarım çalışması yaptım. Robot arabamın sahip olmasını istediğim özellikleri belirledim. Bu özelliklere göre gerekli olacak malzemelerin listesini çıkardım. İnternetten araştırma yaparak bu malzemeleri nerelerden alabileceğimi belirledim.
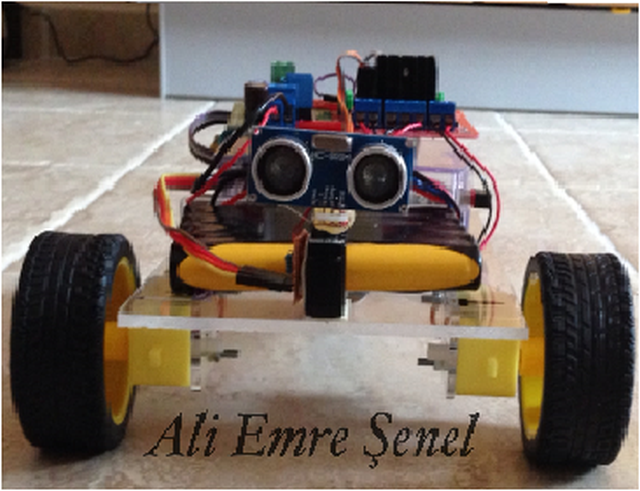
Robotumun daha kolay hareket etmesi için iki tane düz tekerlek ve bunları hareket ettiren iki motor kullandım. Ayrıca arka kısmı dengelemek için 360 derece dönebilen üçüncü bir tekerlek kullandım.
Robotumun engelleri algılayıp çarpmaması için sonar mesafe ölçücü kullandım ve sonar mesafe ölçücüyü hareket ettirmek içinse servo motor kullandım.
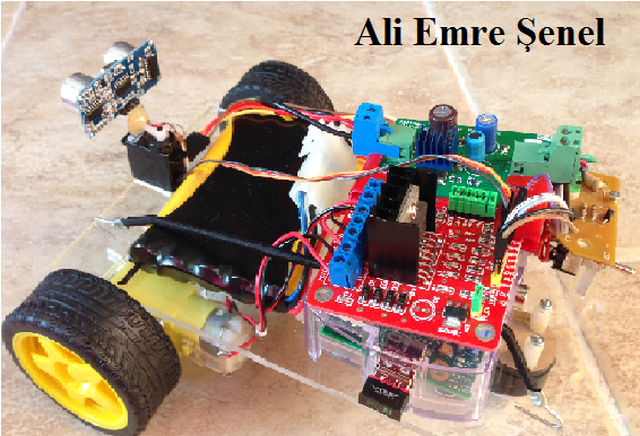
Motorları hareket ettirmek için motor sürücüsü ve yeniden şarj edilebilen NiMh piller kullandım.
Bütün sistemi kontrol etmesi için Raspberry Pi bilgisayar ve bu bilgisayarı yüksek elektrikten korumak içinse Voltaj Regülatörü koydum. Bilgisayarla bağlantı içinse wi-fi adaptörü kullandım. Tüm bu parçaları sabitlemek için lazer kesimden akrilik bir gövde parçası kestirdim.
Diğer yandan motorları ve sonar mesafe ölçücünün nasıl ve ne zaman çalışacağını belirlemek için WebIDE ortamında Python programlama dilinde Raspberry Pi için program yazdım.
Test sürüşleri tamamlanan robotum bu aşamada harekete geçiyor, ortamda bir engelle karşılaştığında duruyor, çevresini kontrol edip en uzak boşluk olan yönde ilerlemeye devam ediyor.
Robot arabam aşağıdaki parçalardan oluşmaktadır;
- Mekanik:
- Akrilik şase
- İki ön tekerlek
- 6v DC motor
- 360 derece dönebilen arka tekerlek
- Servo motor(mesafe ölçer)
- Elektronik:
- Raspberry Pi
- Motor sürücüsü
- Voltaj regülatörü
- Şarj devresi
- 12v şarjlı pil
- Mesafe ölçer
- Usb wi-fi adaptör
- Yazılım:
- Linux işlertim sistemi
- Python webide
- Picar.py yazılımı
resim için tıklayınız
video için tıklayınız